 简体
简体 英文
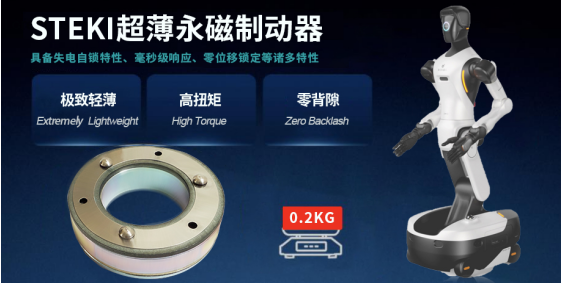
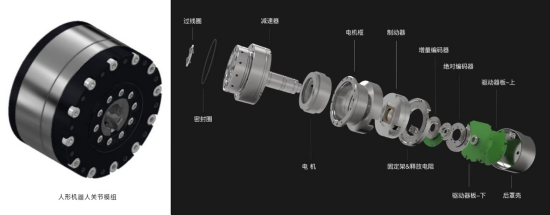
英文在人形机器人的关节模组中,STEKI永磁制动器凭借其失电自锁特性,成为保障安全与提升性能的双重核心组件。当人形机器人突发断电或需要紧急制动时,该制动器能在毫秒级响应时间内实现零位移锁定,有效避免因惯性导致的机械臂失控或碰撞事故,为人形机器人的安全运行提供坚实保障。
同时,其超薄设计(厚度<15mm)与高扭矩密度(可达3Nm)完美适配人形机器人轻量化关节模组的空间约束,成为支撑人形机器人实现 “25kg负载+30%能耗降低” 这一技术指标的关键部件,助力人形机器人实现更高效、更灵活的运动。
一、技术优势:从静态刚度优化到动态抗扰增强
1. 静态刚度强化
STEKI永磁制动器通过永磁体吸附力提供无源制动力,与人形机器人关节的永磁同步电机 (PMSM)协同工作,显著提升静态负载下的定位精度。在装配、打磨等需要高精度定位的场景中,其制动扭矩可有效抵消外部扰动,使位置误差从传统PID控制的>0.3°降至<0.1°,与Simulink仿真中的三闭环伺服控制结果相匹配,为人形机器人完成精细操作提供了可靠保障。
2. 动态响应保障
在人形机器人快速启停或进行轨迹跟踪时,制动器的零背隙设计 (<20arcsec)能够有效抑制振动,确保人形机器人在0.3秒延迟内完成200 + 传感器数据的处理与动作执行。其与谐波减速器的集成进一步降低了关节模组的机械谐振风险,使人形机器人的动作更加流畅、稳定,能够更好地适应复杂多变的运动环境。
3. 安全冗余设计
基于失电制动原理,STEKI制动器在电力故障时自动激活,防止关节因重力或负载惯性下滑。这一特性在医疗手术机器人等高风险场景中尤为重要,符合ISO 13849 - 1功能安全标准,为人形机器人在各类应用场景中的安全运行提供了双重保障,降低了因意外情况导致的安全风险。
二、供应链与成本效益:国产化突破的典范
人形机器人实现大规模量产(如某批次达到5000台)的成功,部分归功于STEKI制动器等核心部件的国产化(国产率超80%)。相较于传统电磁制动器,STEKI的永磁技术减少了线圈能耗与发热问题,将使用寿命延长至百万次以上,大大降低了全生命周期维护成本。其模块化设计还支持快速更换,适配人形机器人关节模组的标准化接口,提高了生产效率和维修便利性,为人形机器人的大规模商业化应用奠定了坚实基础。
三、未来方向:智能化与自适应制动
结合人形机器人智能平台的AI决策能力,下一代STEKI制动器可探索刚度自适应调节功能:通过实时负载感知动态调整制动力,平衡精度与柔顺性需求。例如,在搬运易碎物品时降低制动刚度以避免冲击,而在精密装配时切换至高刚度模式,使人形机器人能够根据不同的任务需求自动调整制动性能,进一步提升其适应性和灵活性,拓展应用场景。
STEKI永磁制动器不仅是人形机器人关节模组的 “安全基石”,更是其高精度、高可靠性性能的隐形推手。随着人形机器人向更复杂场景渗透,此类核心部件的技术突破将持续重构行业竞争力,推动人形机器人技术不断向前发展。





 首页
首页
 产品中心
产品中心
 新闻资讯
新闻资讯
 联系我们
联系我们